 Tweet
Tweet
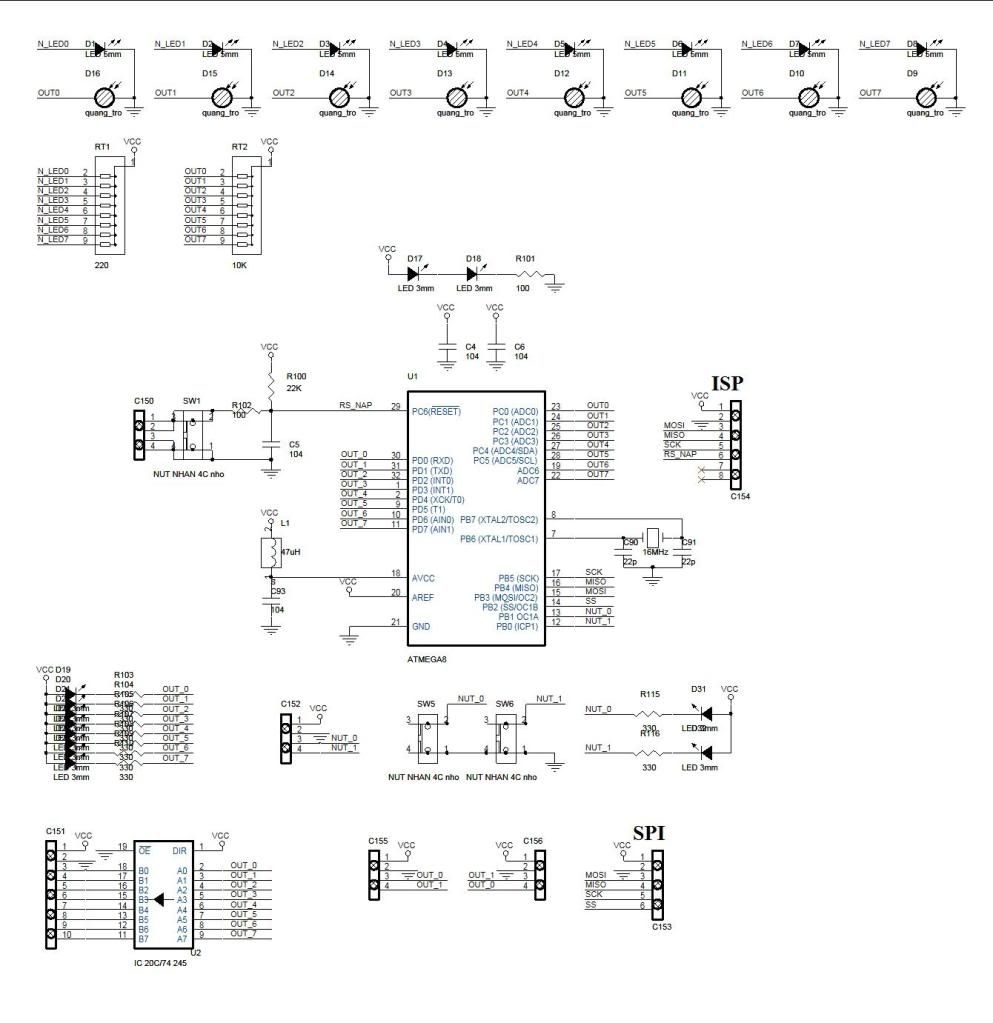
tình hình là trong vòng chung kết RBC 2011 tại đà nẵg,thấy một vài đội tuyển trong đó có Lạc Hồng,vẩn sữ dụng cảm biến bằng quang trở,nhận vạch trắng như mọi năm,nhưng có điều là cách điều chình độ nhạy của cảm biến thì khác hẵn,tức là không như thường là dùng vi trở để chỉnh,mà dùng các nút nhấn ngay trên mạch và điều chỉnh,như ấn Volum,khi nào chuẩn thì thôi,
Không biêt có bác nào đã nghiên cứu cái này chưa thì bày em với,sch+pcb thì quá tôt,Thank!!!!????
Không biêt có bác nào đã nghiên cứu cái này chưa thì bày em với,sch+pcb thì quá tôt,Thank!!!!????

 [/IMG]
[/IMG]


Comment