 Tweet
Tweet
Chào mấy Pác, định làm 1 con robocon chạy tự động nhưng chưa biết làm sao mong các Pro giúp đở! cảm ơn nhiều!
-
-
Robot chạy tự động có hai loại:tự động không dùng vi điều khiển và tự động dùng vi điều khiển (là con thi Robocon ấy).
Tự động không dùng vi điều khiển thì đơn giản,nhưng cách chạy, kiểu chạy cũng đơn giản:
nguồn từ internet:
Hướng dẫn cách làm một robot dò đường đơn giản sử dụng Opamp so sánh (đúng hơn là một chiếc xe lần mò theo vạch đen )
* Chuẩn bị:
- Linh kiện:
- 1 con Opamp loại 8 chân LM393 (2 kênh) hoặc loại 14 chân (4 kênh) LM324. Nếu không có loại LM có thể xài loại khác, như HA chẳng hạn.
- 2 con BJT loại NPN C1815 (hoặc loại khác cũng được).
- 2 quang trở.
- 2 led siu sáng (trắng).
- 6 điện trở 10k.
- 2 Mô tơ, loại cỡ 5V, có thể lấy từ xe đồ chơi của con nít (ở đây tớ lấy từ ổ CD-Rom 1 cái và chôm của thằng bạn 1 cái).
- Nguồn sử dụng 9V hoặc 4.5V (ở đây mình xài nguồn 9V).
- 2 điện trở hạn dòng cho led phát 1k (nếu xài nguồn 9V) và khoảng 220 ôm nếu xài nguồn 4.5V).
- Và các đồ phụ gia tráng trí khác, chủ yếu là led gắn vào cho đẹp, một vài cái dắt cắm, công tắc...
- Đồ dùng khác: mỏ hàn, chì hàn, kéo, băng keo đen (làm vạch)…
* Bắt đầu làm:
+ Phần mạch (ta tách riêng thành 2 phần, 1 phần cảm biến và 1 phần mạch chính cho dễ lắp đặt):
1. Bộ phận “cảm biến”:
-Cách làm:
Sử dụng 2 quang trở, 2 led phát, 2 trở hạn dòng cho led phát. Mắc theo sơ đồ sau:

Ảnh thực tế:

Đặt 2 quang trở cách nhau khoảng 3.5cm-4cm, dùng băng keo đen quấn quanh quang trở để chống nhiễu. Ở đây mình sử dụng thêm 2 công tắc cho led phát để tắc ”khi cần thiết”.
-Nguyên lý hoạt động:
Khi có ánh sáng thì điện trở của quang trở sẽ giảm và ngược lại, điện trở của nó thay đổi cỡ từ 5k (khi có ánh sáng) đến 100k (không có ánh sáng), ta sử dụng 2 led phát làm nguồn sáng cho nó.
=> khi gặp nền trắng, ánh sáng sẽ phản xạ lên quang trở làm điện trở nó giảm xuống và khi gặp vạch đen (băng keo đen) thì ánh sáng sẽ khó phản xạ nên quang trở nhận ít ánh sáng => trở nó tăng. Từ đó dựa vào 2 quang trở, robot có thể phân biệt được vạch đen trên nền trắng (dưới sự hỗ trợ của opamp so sánh).

2. Mạch điều khiển moto (mạch chính)
Sử dụng 6 con trở 10k, Opamp, nguồn 9V, 2 con BJT.
Bjt C1815:

Nguyên lý hoạt động của BJT: miễn bàn.
Opamp LM 324:

Nguyên lý so sánh đơn giản của opamp thế này:
Nếu cho vào cổng (+) (cổng 3, 5, 10, 12) một điện áp lớn hơn điện áp cổng (-) (cổng 2, 6, 9, 13) thì ở cổng ra (cổng 1, 7, 8, 14) sẽ là mức dương, ngược lại là mức 0. Nhớ cấp nguồn cho Opamp ở 2 cổng 4 và 11.
Ở đây mình chỉ sử dụng 2 kênh là (1,2,3) và (5,6,7).
Sơ đồ:

Ảnh thực tế (nhìn hơi rối mắt )
)

Và đây là mạch hoàn chỉnh (2 mạch trên ”cắm” lại với nhau thôi).

+ Phần cơ (phần này hơi khổ).an va hu hu
Chuẩn bị 2 moto và thêm 2 bộ phận giảm tốc, bộ phận này giúp robot dễ ”cày” hơn nhưng chạy chậm hơn. Chạy chậm giúp robot dễ nhận vạch hơn vì mấy cảm biến này thay đổi hơi chậm (chậm mà chéc ).
2 moto ta sẽ gắn với 2 bánh sau, phía trước gắn 1 bánh xe có thể đổi hướng (giống bánh xe ở cái ghế của mấy cha giám đốc á, tất nhiên là xài loại nhỏ thôi). Nếu ko tìm ra loại bánh xe đó thì... đành phải tự chế thôi.
Bên dưới... xe

Bên trên (nói chung là nó cứ như miếng nhựa với 2 bánh xe, chụp ảnh từ di động cùi nên ảnh ko đẹp cho lắm )

+ Phần ”sân” (cái này tốn keo lắm).Ha ha hi hi
Lấy khoảng 4-6 tờ A4 ghép lại thành sân, lấy keo đen dán lên làm vạch, nhớ dán cẩn thận, tránh gồ gề (chỗ uốn dễ bị ”lồi” keo) để xe có thể dễ bon bon trên vạch.
Đây đã tốn nửa cuộn keo đen (5k 1 cuộn) để dán đi dán lại cái sân mà chẳng ra hồn.
Hình ảnh:Ha ha hi hi

* Nguyên lý hoạt động của toàn mạch:
- Khi 2 cảm biến đều nhận nền trắng:
Điện trở của 2 quang trở đều giảm xuống chừng 5k => cổng 3 và 5 của Opamp sẽ có áp cao hơn cổng 2 và 6 (cổng 2 và 6 ta phân áp cố định cho nó là 9/2=4.5V).
=> Cổng ra 1 và 7 của 2 kênh sẽ ở mức dương => kích 2 BJT dẫn
=> cả 2 moto đều quay
>Cả 2 moto đều quay, robot chạy thẳng.
- Khi cảm biến bên trái nhận vạch đen (robot đang lệch phải).
Điện trở của quang trở 1 sẽ tăng lên cỡ 50-80k => áp trên cổng 3 sẽ bé hơn 4.5V (áp trên cổng 2) => cổng ra 1 sẽ là 0V => BJT 1 sẽ ngưng dẫn => mô tơ 1 (bên trái) ngừng quay. Trong khi đó moto bên phải vẫn quay vì cảm biến phải nhận nền trắng.
>Moto trái ngừng, moto phải vẫn quay => robot sẽ rẽ sang trái.
- Tương tự khi cảm biến phải nhận vạch đen (robot đang lệnh trái).
>Moto phải ngừng, moto trái vẫn quay => robot sẽ rẽ phải.
Như vậy, robot (chiếc xe cà tàng) của chúng ta sẽ bám (lần, mò...) được vạch đen trên nền trắng.
http://www.youtube.com/v/HfiWRIELAAA...dded&version=3
Một vài lưu ý:
- Vì dòng ra của BJT ko lớn lắm nên xài moto từ xe đồ chơi con nít đôi khi ko chạy nổi.
- Phần sân làm thì nên có những khúc qua vừa phải, đừng cong quá mà cả 2 cảm biến đều nằm trên vạch đen thì robot sẽ ko nhúc nhích nữa.
- Có thể thay thế mấy con 10k trong mạch bằng biến trở 20k (vì đây mua biến trở 20k ko ra nên ko xài luôn).
- Có thể mắc thêm Diode bán dẫn vào mỗi moto để tránh dòng điện sinh ra từ moto có thể ảnh hưởng đến mạch (cái này nghe mấy anh làm robot nói vậy).
- Nếu robot chạy nhanh quá thì có thể nó sẽ ko bám đc vạch vì mấy con quang trở đáp ứng khá chậm, khắc phục bằng cách dùng hộp giảm tốc hoặc mắc song song với moto vài con led trang trí cho đẹp hoặc.... chờ cho pin yếu đi cũng đc Ha ha hi hi.
Còn robot dùng vdk thì hơi phức tạp hơn 1 chút,nó gồm 3 phần cơ bản là
- phần điều khiển ,đc xem như là bộ não của xe,là nơi có vdk,điều khiển hoạt động của xe.
-phần dò đường,là con mắt của xe,để giúp xe đi đúng đường.
-phần công suất,nếu vdk là bộ não thì phần công suất có thể coi là phần cơ thể. -
Bài này là của bác minhtuanbk99 trên diễn đàn chứ internet nào?Nguyên văn bởi daaa Xem bài viết
@thanhvu_tv87: Bác đã làm phần cơ khí chưa? Trước tiên phải làm phần cơ khí cho xong đã rồi mới tính tới mạch và lập trình. Chỗ nào thắc mắc bác cứ lên đây hỏi, chứ bác hỏi chung chung vậy khó mà trả lời quá
Comment
-
Phần cơ thì mình đang làm, thật ra thì trường mình đang tổ chức cuộc thi robocon nho nhỏ...hình sân thi đấu như sau:Nguyên văn bởi ckd-ir Xem bài viết
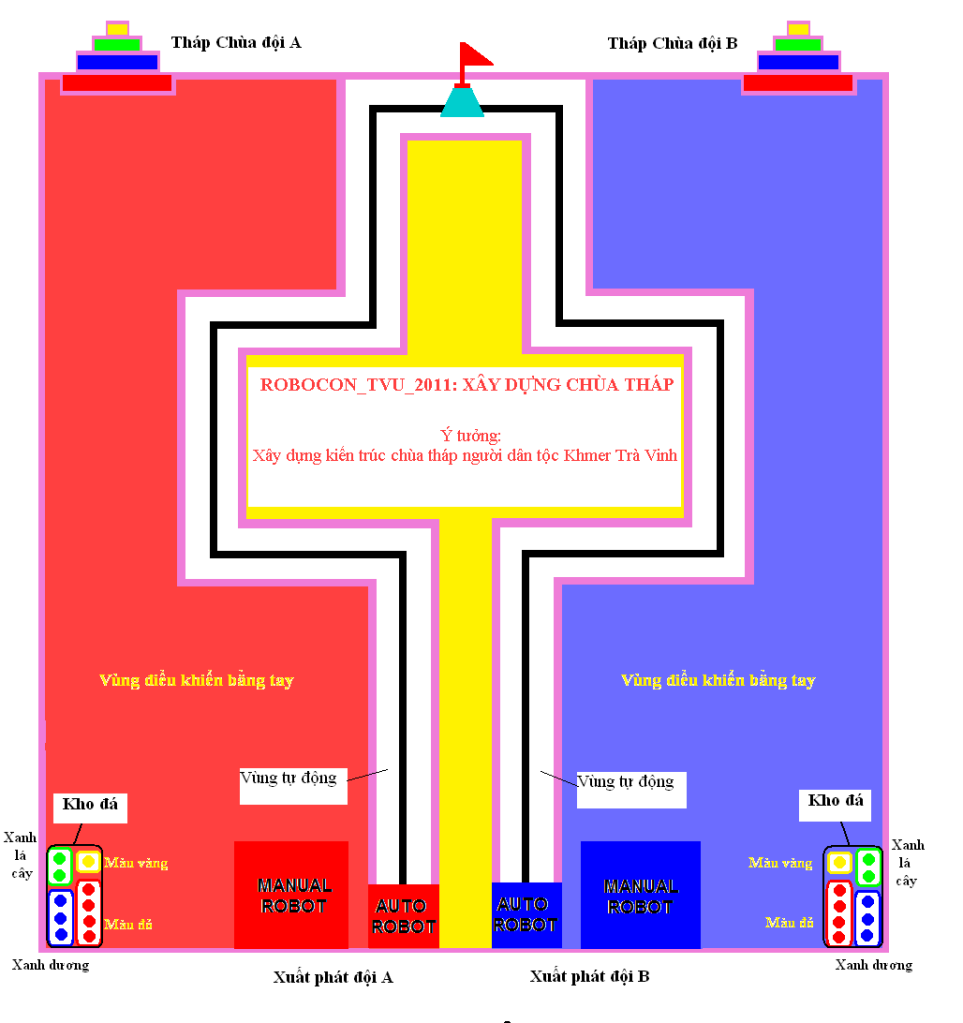
Ý mình làm sao cho robot chạy tự động nhanh và qua cua tốt...mình định dùng Motor DC 12V có encoder, 2 led dò vạch màu đen 2 leds đếm vạch ngang...hihi vì chưa từng làm nên còn gà lắm mong các Pác chỉ giáo!Comment
-
http://www.dientuvietnam.net/forums/...��n-mực-đen.Nguyên văn bởi thanhvu_tv87 Xem bài viết
Coi link trên.Comment
-
Bác cho em xin cái luật với! Nhìn cũng hấp dẫn đấy chứ, em cũng quê TV đây Đang nghỉ hè không biết làm gì, nhìn thấy robot là ngứa tay rồi  Có gì bác pm nick ckd_ir cùng trao đổi
Có gì bác pm nick ckd_ir cùng trao đổi
Comment
-
-
Mình muốn làm 1 robocon tự động có cơ cấm cờ và chạy nhanh đếm vạch ngang luôn chứ k phải đơn giản chạy theo vạch màu đen số 8 như vậy....cao thủ nào rành về robocon thì chỉ giáo!thanksNguyên văn bởi Paddy Xem bài viếtComment
-
Mình muốn làm 1 robocon tự động có cơ cấm cờ và chạy nhanh đếm vạch ngang luôn chứ k phải đơn giản chạy theo vạch màu đen số 8 như vậy....cao thủ nào rành về robocon thì chỉ giáo!thanksNguyên văn bởi Paddy Xem bài viếtComment
-
Mình có video mô phỏng luật luôn ...bạn nào hứng thú thì pm nick mình nha!
thanhvu_tv87 cùng trao đổi!Comment
-
Bác nào có file layout thiết kế phần dò đường cho em xin với ạ?Quang Nhat
---------------------------------------
Yahoo :quangnhat85ls
Mail :
Nhận thiết kế và ép nhựa cho đồ điện tửComment
-
-
a cho e hoi la: e muon dung vi dieu khien de dieu khien động cơ thì minh kết hơp với mạch vi điều khiển với mạch động cơ ra sao?
và mạch nguyên lý của nó! rất mong sự giúp đỡ of a ! xal0vang@yahoo.com.vnComment
-
Mình làm về lập trình, nên mình có thể cung cấp một vài kiến thức cũng như kinh nghiệm mà mình tích lũy được trong quá trình làm robot còn phần mạch thì mình hơi ngại! hihi! (chỉ hiểu nguyên lý chứ chả động vào bao giờ)
thứ nhất là vẫn đề dò đường theo line. cảm biến thông dụng nhất để dò line là cảm biến quang (khá ổn định và dễ làm)
tín hiệu truyền về có thể qua mạch xử lý (mạch so sánh cho ra mữc 0 1) hoặc có thể truyền thẳng vào chíp (sử dụng chuyền đồi ADC) để nhận biêt line.Comment
-
Bạn có thể cho mình xin code của phần đếm vạch không. Mình đang làm robot mà hơi rối chổ đếm vạch. Mong các bác giúp đỡComment

-
 Trả lời cho Tìm bạn thân quen cũ.Dạ cháu đọc 1 số bài viết của bác vi... thì nhớ đc bác là 1 cụ già gần 80 tuổi, sức khỏe yếu. Đam mê và làm vc về kỹ thuật điện. Thích thơ ca. Có nhìu bài chia sẻ quý báu cho thế hệ sau. Tuy nhiên già rồi nên khái tính, bảo thủ, nhưng vẫn đáng kính ạ... còn lão nhathung... thì kiểu bố đời31-07-2026, 12:52
Trả lời cho Tìm bạn thân quen cũ.Dạ cháu đọc 1 số bài viết của bác vi... thì nhớ đc bác là 1 cụ già gần 80 tuổi, sức khỏe yếu. Đam mê và làm vc về kỹ thuật điện. Thích thơ ca. Có nhìu bài chia sẻ quý báu cho thế hệ sau. Tuy nhiên già rồi nên khái tính, bảo thủ, nhưng vẫn đáng kính ạ... còn lão nhathung... thì kiểu bố đời31-07-2026, 12:52 -
 Hãng nào tùy thích thôi bác! bây giờ các hãng đều hỗ trợ xem qua máy tính hay điện thoại đều được. Gắn Trước tiên mua về cắm nguồn set ip hết xong hãy lắp lên, cam poe chỉ cần 4 lõi là hoạt động bình thường nên 1 dây kéo cho 2 cam vẫn ok30-07-2026, 15:49
Hãng nào tùy thích thôi bác! bây giờ các hãng đều hỗ trợ xem qua máy tính hay điện thoại đều được. Gắn Trước tiên mua về cắm nguồn set ip hết xong hãy lắp lên, cam poe chỉ cần 4 lõi là hoạt động bình thường nên 1 dây kéo cho 2 cam vẫn ok30-07-2026, 15:49 -
Trả lời cho Tìm bạn thân quen cũ.Nhớ không nhầm thì lúc còn đi học có gặp chú 1 lần cf bãi xe Nguyễn Kim, giờ quán cf đó nghỉ bán rồi30-07-2026, 15:44
-
Trả lời cho Thắc mắc pin 21v ?Con số đấy biểu thị gần đúng thôi, cái đồng hồ đó có đảm bảo chính xác hay không? pin có cục lên 4v4 vẫn bình thường. Cái gì cũng có sai số trong phạm vi không quá lớn thì không ảnh hưởng gì đâu, bàn ngay ngón ngắn ngón dài mà30-07-2026, 15:32
-
Trả lời cho Amply bị rò DC 22 voltThay mấy con transisto nhỏ đầu vào, thường vi sai lỗi hay bị. Khám tổng quát chân các linh kiện xem có bị rỉ sét nhiều không?30-07-2026, 15:24
-
Mạch này hiệu suất ra led đạt khoảng 90.7% tại 12V in, 40W out.27-07-2026, 10:15
-
Có lẽ nguồn viết bài này chỉ mang tính định tính để nói rằng cần thay đổi tổng trở tải để có Pmax chứ trình bày chưa chi tiết và thấu đáo một cách định lượng. Công thức tổng quát phải có mặt L mới được, và nói là "tổng...27-07-2026, 10:09
-
Trả lời cho [Chia sẻ] Tổng hợp các công ty AI Việt Nam đang làm gì thật sự — Từ voicebot, computer vision đến AI agentsCàng ngày, CNTT càng trở nên lôi thôi , rách việc.
Cái AI và Ge... trên trình duyệt chỉ tổ làm vướng mắt, mất thì gian.
Tôi toàm phải mất cộng tắt nó đi.25-07-2026, 14:59
Comment