 Tweet
Tweet
sao bác ko tich hợp them chức năng hẹn giờ vô lun ^^,
-
-
Bạn tích hợp led hiển thị nhiệt độ luôn được không? giúp mình đi.Nguyên văn bởi vietthanh123 Xem bài viếtComment
-
có bác nào biết mua con lm336-2.5v o dâu ko ? chỉ cho em voi,em qua Nhật Tảo tìm hoài mà ko có
Comment
-
hihi ko biết j nhưng mà mấy bạn mới học vào nhìn thất cái code phát ốm lun sao ma hiểu dc hihi??Comment
-
hihi mình cũng mới học nên chịu đấy hi jo muôn hoc vdk mà ko biết học cái j?ko làm thế nào mấy bạn viết code giỏi thi lần sau đăng code viết chú thích đằng sau câu lênh để minh học với ??ko minh nhin hoa hết mắt hiComment
-
có bác nào biết ko chỉ dùm em với ^^,Comment
-
-
-
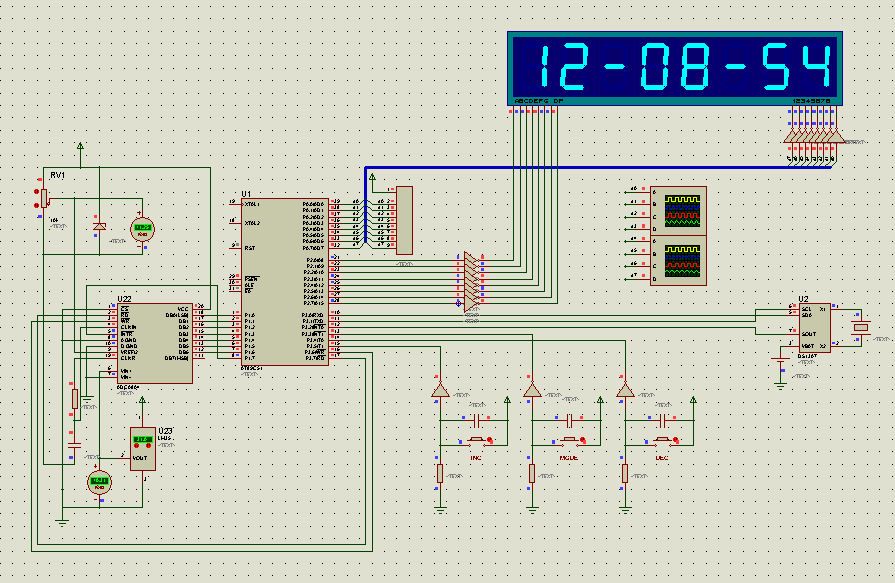
a trai ơi. mạch nguyên lý mờ quá. cho em bản chuẩn được không ạ
Comment
 , hôm nay rảnh ngồi send cho ae nào quan tâm tới vấn đề này. Một cái project mình làm đầy đủ cả, bạn nào thích thì load về lắp chơi nhé.
, hôm nay rảnh ngồi send cho ae nào quan tâm tới vấn đề này. Một cái project mình làm đầy đủ cả, bạn nào thích thì load về lắp chơi nhé.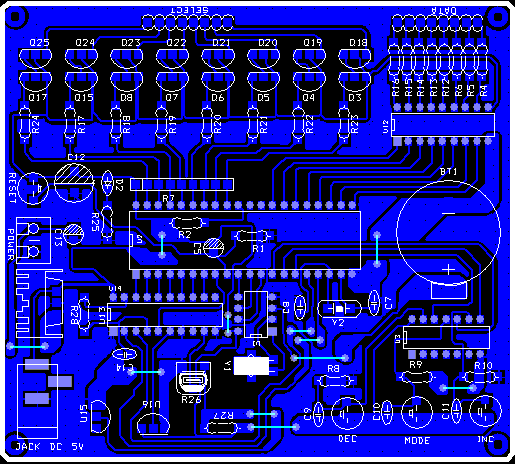


-
 Hãng nào tùy thích thôi bác! bây giờ các hãng đều hỗ trợ xem qua máy tính hay điện thoại đều được. Gắn Trước tiên mua về cắm nguồn set ip hết xong hãy lắp lên, cam poe chỉ cần 4 lõi là hoạt động bình thường nên 1 dây kéo cho 2 cam vẫn okHôm qua, 15:49
Hãng nào tùy thích thôi bác! bây giờ các hãng đều hỗ trợ xem qua máy tính hay điện thoại đều được. Gắn Trước tiên mua về cắm nguồn set ip hết xong hãy lắp lên, cam poe chỉ cần 4 lõi là hoạt động bình thường nên 1 dây kéo cho 2 cam vẫn okHôm qua, 15:49 -
Trả lời cho Tìm bạn thân quen cũ.Nhớ không nhầm thì lúc còn đi học có gặp chú 1 lần cf bãi xe Nguyễn Kim, giờ quán cf đó nghỉ bán rồiHôm qua, 15:44
-
Trả lời cho Thắc mắc pin 21v ?Con số đấy biểu thị gần đúng thôi, cái đồng hồ đó có đảm bảo chính xác hay không? pin có cục lên 4v4 vẫn bình thường. Cái gì cũng có sai số trong phạm vi không quá lớn thì không ảnh hưởng gì đâu, bàn ngay ngón ngắn ngón dài màHôm qua, 15:32
-
Trả lời cho Amply bị rò DC 22 voltThay mấy con transisto nhỏ đầu vào, thường vi sai lỗi hay bị. Khám tổng quát chân các linh kiện xem có bị rỉ sét nhiều không?Hôm qua, 15:24
-
 Mạch này hiệu suất ra led đạt khoảng 90.7% tại 12V in, 40W out.27-07-2026, 10:15
Mạch này hiệu suất ra led đạt khoảng 90.7% tại 12V in, 40W out.27-07-2026, 10:15 -
Có lẽ nguồn viết bài này chỉ mang tính định tính để nói rằng cần thay đổi tổng trở tải để có Pmax chứ trình bày chưa chi tiết và thấu đáo một cách định lượng. Công thức tổng quát phải có mặt L mới được, và nói là "tổng...27-07-2026, 10:09
-
Trả lời cho [Chia sẻ] Tổng hợp các công ty AI Việt Nam đang làm gì thật sự — Từ voicebot, computer vision đến AI agentsCàng ngày, CNTT càng trở nên lôi thôi , rách việc.
Cái AI và Ge... trên trình duyệt chỉ tổ làm vướng mắt, mất thì gian.
Tôi toàm phải mất cộng tắt nó đi.25-07-2026, 14:59 -
 Em có con amply 12 sò D 718 và e688 , biến áp 15A, 30v 0 30 v, một kênh thì hoạt động bình thường, kênh còn lại nổ bụp bụp, sột sột, đèn tín hiệu nhảy lên vạch max, khoảng 4 đến 5 giây, sau đó đèn tín hiệu trả về mức không, Em thấy như...24-07-2026, 13:50
Em có con amply 12 sò D 718 và e688 , biến áp 15A, 30v 0 30 v, một kênh thì hoạt động bình thường, kênh còn lại nổ bụp bụp, sột sột, đèn tín hiệu nhảy lên vạch max, khoảng 4 đến 5 giây, sau đó đèn tín hiệu trả về mức không, Em thấy như...24-07-2026, 13:50 -
 Trả lời cho Tìm hiểu máy hàn lăn (Rolling Welding)bác cần thì liên hệ Em: mayhanhaivuong.com (0903238399)...24-07-2026, 10:58
Trả lời cho Tìm hiểu máy hàn lăn (Rolling Welding)bác cần thì liên hệ Em: mayhanhaivuong.com (0903238399)...24-07-2026, 10:58 -
Trả lời cho Công thức tính định luật kirchhoffGiải bằng hệ phương trình bật nhất 3 ẩn.
 ...
23-07-2026, 14:52
...
23-07-2026, 14:52
Comment