 Tweet
Tweet
Hi cả nhà,bữa nay mình lại mạo muội đưa lên 1 vấn đề nan giải của 1 cái Motor 3 pha Mini.
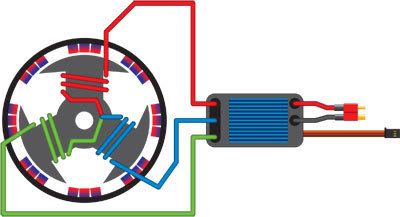
Motor này có tất cả là 9 cuộn. Chia đều 3 lõi là 1 cuộn dây, vậy là ta có tất cả là 3 cuộn dây, tương đương với A,B,C trong Motor bơm nước có ở mỗi gia đình.^^
X,Y,Z nó đấu chung vào nhau ạ.[/SIZE]

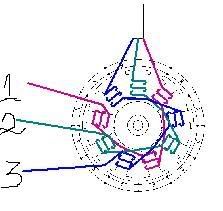
Màu của cái hình gửi kèm có khác biệt với nội dung trên
( Đen=Hồng, X.Dương=X.Lá và Đỏ=X.Đậm)
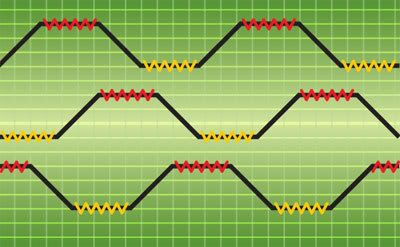
MÌnh đả test và thiết lập được Bảng Trạng Thái của Motor rồi, như sau:
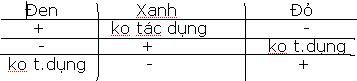
[SIZE="4"](+) = đấu với + nguồn.
(-) = đấu với - nguồn.
ko t.dụng = bỏ trống, không ghim vào đâu hết. :55_003:
Theo bảng trạng thái trên thì Motor sẽ quay thuận theo chiều Kim đồng hồ đủ 1 vòng của trục quay.
Ta nhận thấy các đầu dây Đen, Xanh, Đỏ lần lượt ĐẢO trạng thái là +, rồi xuống - , rồi để trống. Như vậy có nghĩa là từng Dây sẽ đổi trạng thái trong mỗi góc quay.
Vấn đề này mình đã hỏi các Thầy trong lớp, nhưng không ai có thể giúp mình làm cho Motor này quay được. Cơ bản trước mắt chỉ cần quay 1 chiều, còn cái vụ Đảo chiều quay của Motor thì ta bàn sau.
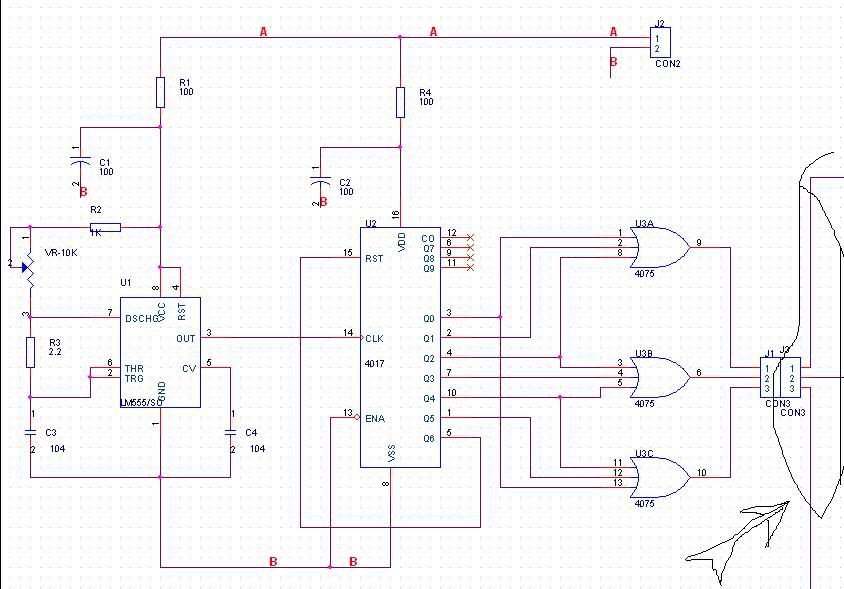
Hiện tại khó khăn vướng phải của mình là muốn điều khiển cho Motor này quay, nhưng không cần Sử Dụng đến các IC lập trình như Pic, 89..v..v.vv
Mình suy nghĩ ra 1 con IC có thể phát ra xung kích đảo trang thái như trên đó là dùng IC đếm 4017. Khi đó trang thái kích sẽ đi từ Out A0 ---> A3.(kích lần lượt vô các dây Đen , Xanh , Đỏ) ngõ ra out A4 ta nối lại vào chân Reset của IC để đưa IC về trạng thái ban đầu.
Đến nay đã gần 1 năm 7 tháng nhưng tớ vẫn bế tắc với em Motor này.
Các Bro và Pro nào , MOD nữa, có thể chỉ em cách làm cho Motor này chạy được không???? chỉ sử dụng IC Analog thôi nhé.^^
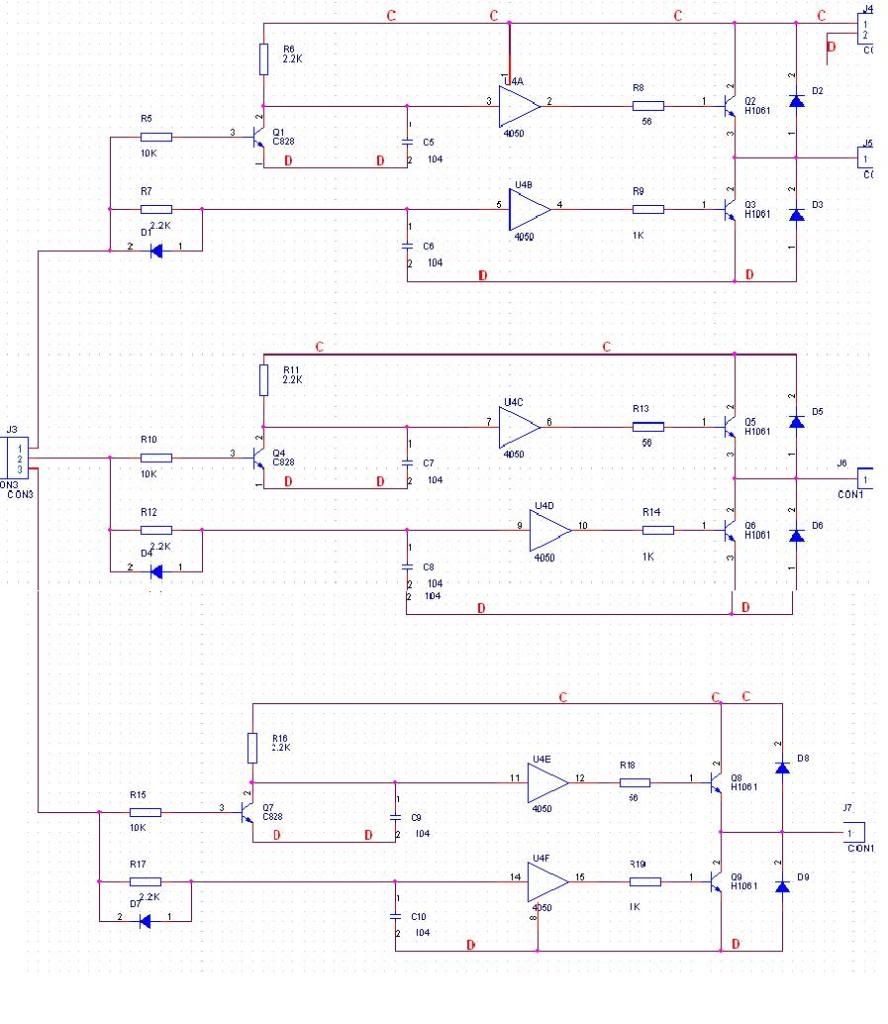
Và em nghĩ chắc mình phải đưa qua Driver kéo bằng Fet hay Transistor công suất để nó kéo Motor chứ ha???:55_003:
Mong các Bác giàu kinh nghệm chỉ giáo , giúp đỡ em.^^
Cảm ơn cả nhà rất nhiều
Còn đây là sơ dồ của 1 người Thầy trong lớp em hướng dẫn làm Đề Tài với cái Motor này, so từ ngõ out của 4017 thì rất chính xác, nhưng qua phần Driver thì chả chạy được,hic
còn đây là em search trên Datasheet, thì vẫn vướng phải chỗ Hall sensor, vì Motor của em không có các cảm biến Hall, đồng thời Bảng trạng thái của IC 2936 cũng không "khớp" với Bảng trâng thái của Motor em nữa,
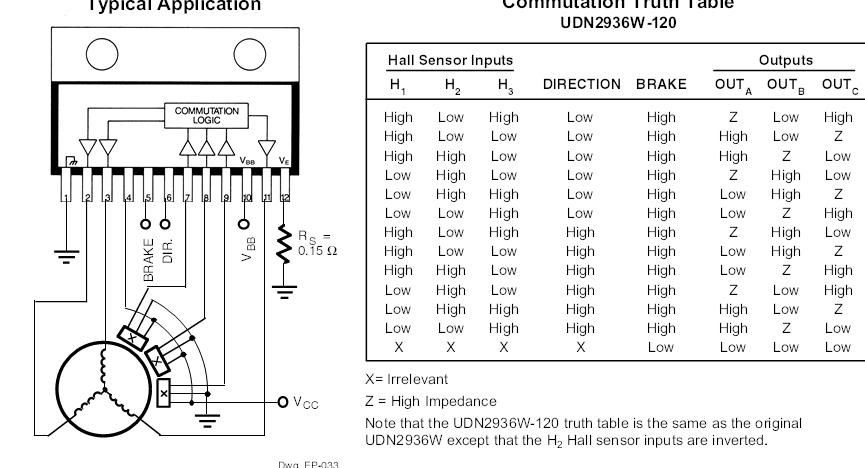
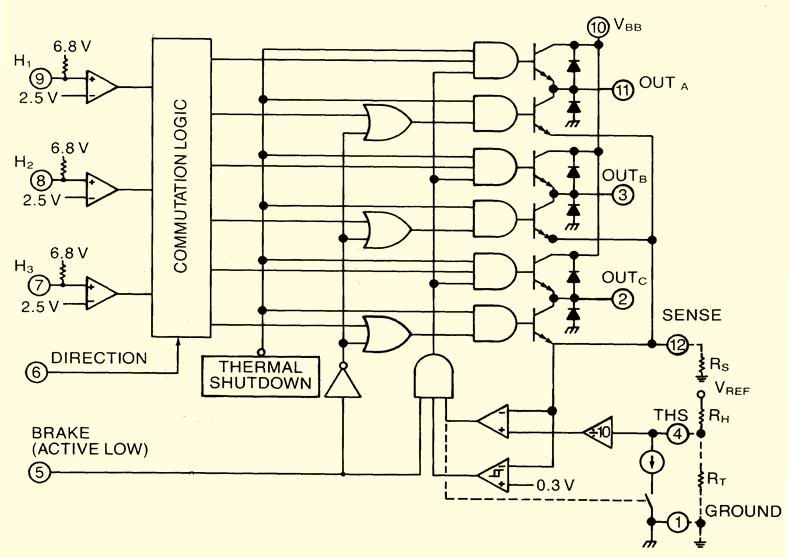
đây là cấu trúc con IC đó:
Rất mong các Bác Pro chỉ giáo và giúp em hoàn thành cái đề tài chết bầm này..hic..hic..
còn 1 tháng 3 ngày nữa là em phải nộp, ông Thầy thì cứ bảo em Vẽ mạch in sai, thế mới khổ, mà em kiểm tra mạch đến từng milimet.
Cảm ơn cả nàh nhiều ơi là nhiều..
Motor này có tất cả là 9 cuộn. Chia đều 3 lõi là 1 cuộn dây, vậy là ta có tất cả là 3 cuộn dây, tương đương với A,B,C trong Motor bơm nước có ở mỗi gia đình.^^
X,Y,Z nó đấu chung vào nhau ạ.[/SIZE]
Màu của cái hình gửi kèm có khác biệt với nội dung trên
( Đen=Hồng, X.Dương=X.Lá và Đỏ=X.Đậm)
MÌnh đả test và thiết lập được Bảng Trạng Thái của Motor rồi, như sau:
[SIZE="4"](+) = đấu với + nguồn.
(-) = đấu với - nguồn.
ko t.dụng = bỏ trống, không ghim vào đâu hết. :55_003:
Theo bảng trạng thái trên thì Motor sẽ quay thuận theo chiều Kim đồng hồ đủ 1 vòng của trục quay.
Ta nhận thấy các đầu dây Đen, Xanh, Đỏ lần lượt ĐẢO trạng thái là +, rồi xuống - , rồi để trống. Như vậy có nghĩa là từng Dây sẽ đổi trạng thái trong mỗi góc quay.
Vấn đề này mình đã hỏi các Thầy trong lớp, nhưng không ai có thể giúp mình làm cho Motor này quay được. Cơ bản trước mắt chỉ cần quay 1 chiều, còn cái vụ Đảo chiều quay của Motor thì ta bàn sau.
Hiện tại khó khăn vướng phải của mình là muốn điều khiển cho Motor này quay, nhưng không cần Sử Dụng đến các IC lập trình như Pic, 89..v..v.vv
Mình suy nghĩ ra 1 con IC có thể phát ra xung kích đảo trang thái như trên đó là dùng IC đếm 4017. Khi đó trang thái kích sẽ đi từ Out A0 ---> A3.(kích lần lượt vô các dây Đen , Xanh , Đỏ) ngõ ra out A4 ta nối lại vào chân Reset của IC để đưa IC về trạng thái ban đầu.
Đến nay đã gần 1 năm 7 tháng nhưng tớ vẫn bế tắc với em Motor này.
Các Bro và Pro nào , MOD nữa, có thể chỉ em cách làm cho Motor này chạy được không???? chỉ sử dụng IC Analog thôi nhé.^^
Và em nghĩ chắc mình phải đưa qua Driver kéo bằng Fet hay Transistor công suất để nó kéo Motor chứ ha???:55_003:
Mong các Bác giàu kinh nghệm chỉ giáo , giúp đỡ em.^^
Cảm ơn cả nhà rất nhiều
Còn đây là sơ dồ của 1 người Thầy trong lớp em hướng dẫn làm Đề Tài với cái Motor này, so từ ngõ out của 4017 thì rất chính xác, nhưng qua phần Driver thì chả chạy được,hic
còn đây là em search trên Datasheet, thì vẫn vướng phải chỗ Hall sensor, vì Motor của em không có các cảm biến Hall, đồng thời Bảng trạng thái của IC 2936 cũng không "khớp" với Bảng trâng thái của Motor em nữa,
đây là cấu trúc con IC đó:
Rất mong các Bác Pro chỉ giáo và giúp em hoàn thành cái đề tài chết bầm này..hic..hic..
còn 1 tháng 3 ngày nữa là em phải nộp, ông Thầy thì cứ bảo em Vẽ mạch in sai, thế mới khổ, mà em kiểm tra mạch đến từng milimet.
Cảm ơn cả nàh nhiều ơi là nhiều..

 ... Các bạn chỉ cần nghĩ đơn giản như vầy nếu open loop mà ok thì tại sao cái quạt tản nhiệt PC rẻ tiền vẫn phải dùng close loop? Trong khi tải của nó rất nhỏ (Sức cản không khí
... Các bạn chỉ cần nghĩ đơn giản như vầy nếu open loop mà ok thì tại sao cái quạt tản nhiệt PC rẻ tiền vẫn phải dùng close loop? Trong khi tải của nó rất nhỏ (Sức cản không khí  ).
).



Comment