 Tweet
Tweet
Nguyên văn bởi thaithutrang
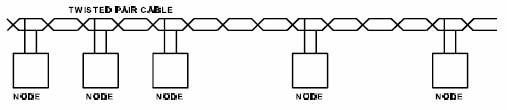
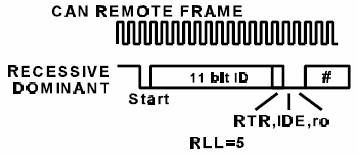
Tương tự trong mạng CAN...
 Suy nghĩ về vấn đề này xem.
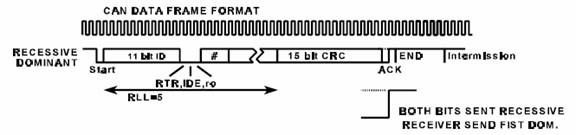
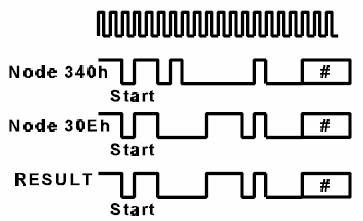
Suy nghĩ về vấn đề này xem.Một vấn đề khác biệt nữa là vấn đề protocol. Vì CAN định nghĩa phương pháp CSMA-CD, cái này nên Receiver của nó phải tương thích với protocol. Còn trong mạng RS485 thường áp dụng các giao thức Control Flow kiểu khác như Master - Slave hoặc Token Ring...
 )
)
 Mở đầu một vụ tranh luận mới đây.
Mở đầu một vụ tranh luận mới đây.


Comment