 Tweet
Tweet
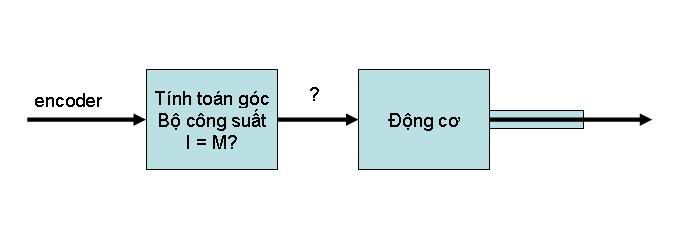
Để giải thích vì sao F trả lời ngắn gọn, F vẽ cái hình này ra, các bạn thấy rằng, nếu điều khiển như trên, hệ thống vẫn chỉ là vòng hở.
Vấn đề khó khăn trong robotics, đó là những nhà điều khiển trước nay luôn quan niệm, điều khiển lực là lực, điều khiển vị trí là vị trí. Nên nếu làm bài toán này, có thể nói nó trở nên vô cùng phức tạp. Và thực tế là nếu các bạn có tìm được tài liệu tham khảo nào, thì nó cũng trở nên vô cùng phức tạp.
Dẫu sao, F chỉ trả lời ngắn gọn, rằng bài giải của bạn gì đưa ra phía trên kia đã sai, cũng là để mở ra thêm một bước khi các bạn suy nghĩ.

 không thì thôi vậy
không thì thôi vậy  )
)

Comment